こんばんは。
M1になり、研究室でCNCを設計することになりました。
前回はbCNCというソフトの導入までを描きました。bCNCを使ってモーターを回すところまでやります。今回はInkspaceとbCNCのインストールが終わっているというていで記事を書き進めます。「まだ、インストール終わってないよ~」という方は前の記事をご覧ください。
*前回の記事:【製作日誌】自作CNCを作る~bCNCの使い方①~
*前々回の記事:【製作日誌】自作CNCを作る~Inkspaceの使い方
*これまで同様、自分のメモとして書いています。間違い・もっといい方法などありましたら、ご指導お願いいたします!
*執筆中、絶賛作成中のため、散発的な投稿になります🙇
完成したら、まとめます!
それでは~
シュワッチ!
①準備するもの(この記事内で、、、)
・PC
・Arduino Uno R3
・12Vの電源(私は家じゅうを物色して直流12Vに変換できるACアダプタを見つけたので、それを使っています)
*上で紹介したCNCシールド V3.0を買うと、Arduino互換品とNEMA17が1個付いてきます。「とりあえず、1軸だけでもいいかな~」という方はこのCNCシールドとACアダプタを買うだけで充分です。値段、安すぎんかΣ(・□・;)
②作業内容
(1)ハード
まずはハード環境を整えたいと思います。
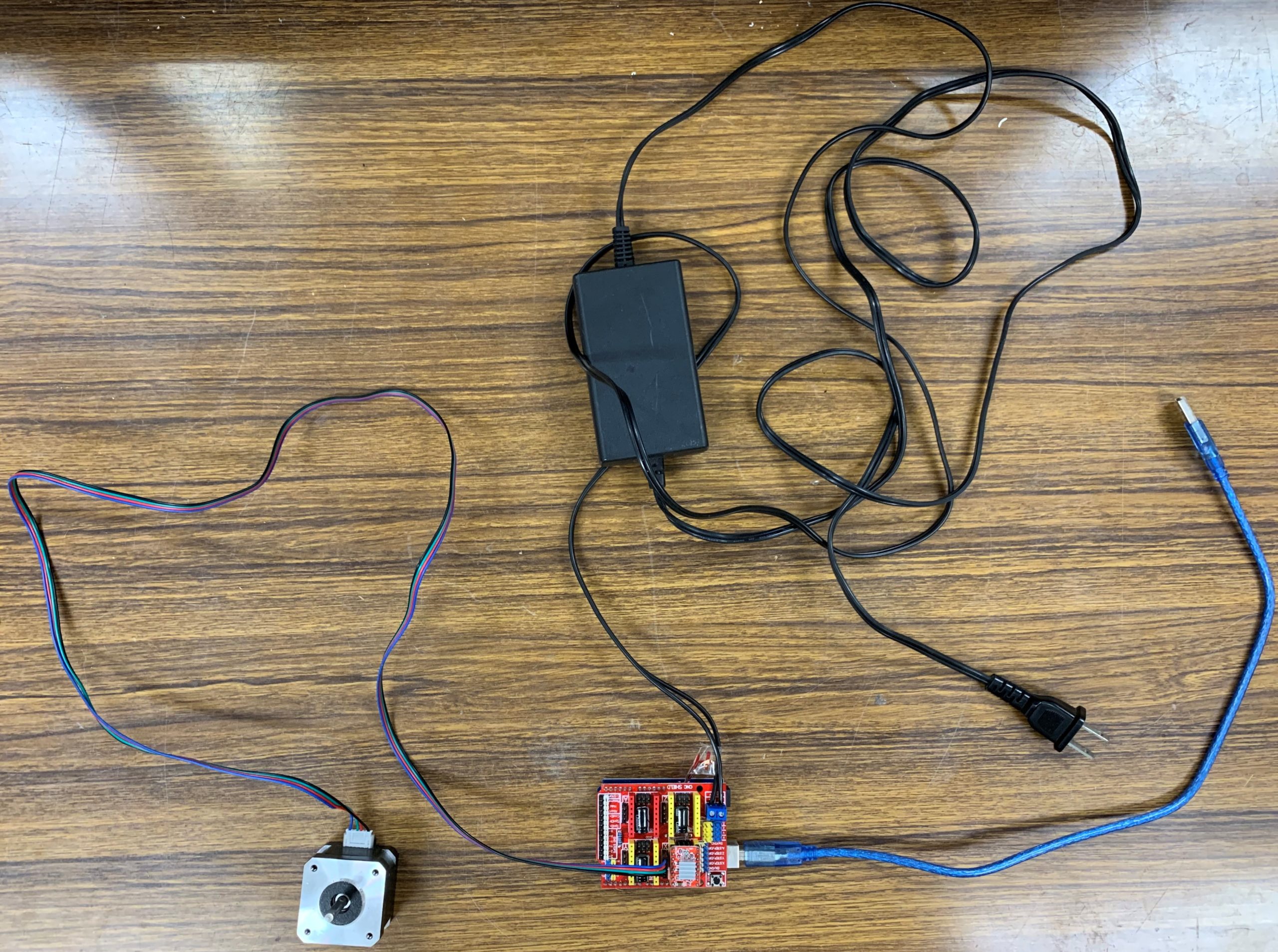
説明の前に完成形は下の写真のようになります。今回は1軸だけつないでみました。
全体写真↓
拡大写真↓
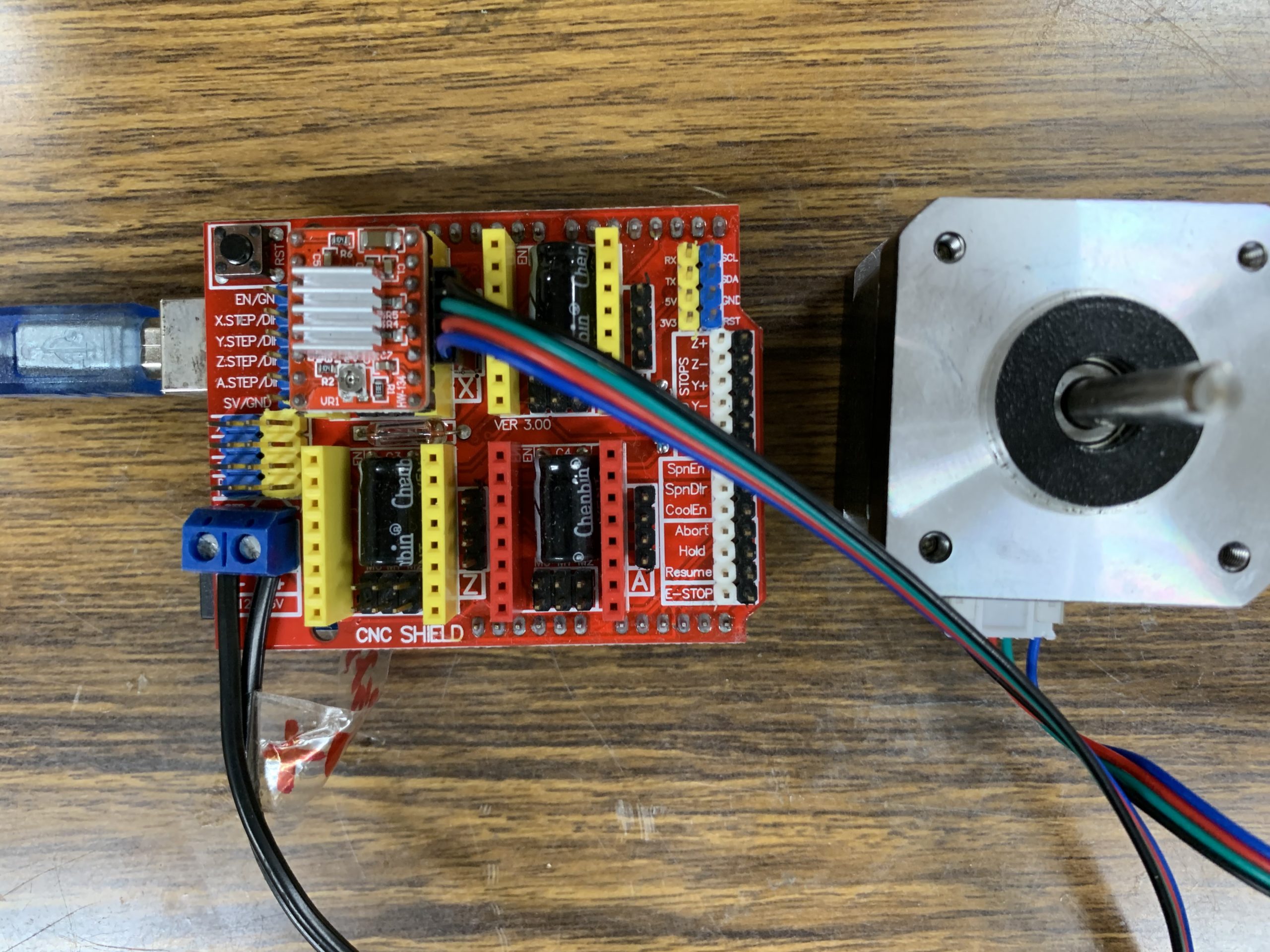
ちなみに、CNCシールドは配線をすっきりさせてくれるのが大きなメリットで、ブレッドボードとかにモータードライバーとかを正しく接続すれば、同様の機能が発揮できるものを作れるはずです。(僕はできません、、、)
それでは、配線について書いていきます。
このCNCシールド V3.0に接続できるのはA4988というステッピングモータードライバです。(付属されています)メーカーの公式サイトを見ると、非常に丁寧に書かれているので配線も迷わずに行うことができると思います。英語ですが、Google翻訳かDeepLにかけちゃえば読めます!ここでは最低限必要な部分をまとめて書きます。詳しい内容が知りたい方は公式サイトをご覧ください。
A4988のだいたいのピンの役割やどこにつなげばいいかを図示したのが下の図です。
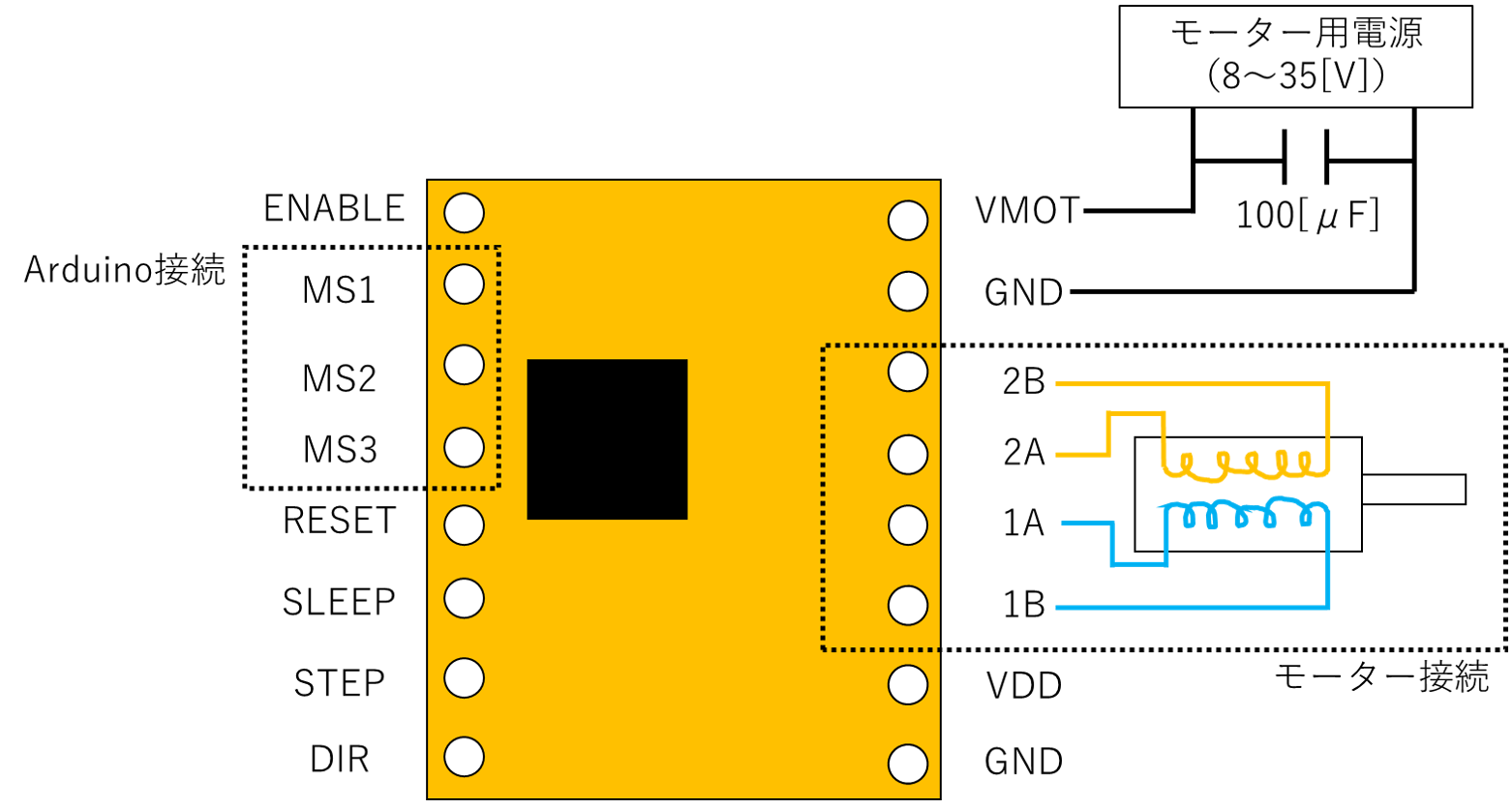
上の図を見てもわかりますが、今回、電源を2つ使います。これはマイコン用の電源(ロジック電源)とモーター用の電源です。なぜ、わざわざ2種類の電源を使うかというと、モーターとマイコンで使用する電圧値が違うからとモーターがかなり電流を消費してしまうため、大きなノイズが発生し、制御系へ影響を与えてしまうからです。
今回の場合、マイコン用の電源はPCからUSB経由で取得し、モーター用の電源はコンセントからACアダプタを通して得ています。次に狙う電圧値を決めていきます。電圧値に関係のある要素は下記のとおりです。
・動作する電圧:12~36[V]
<参考>CNCシールド V3.0
2.A4988:
・動作電圧:8~35[V]
・最大電流(モーター1個当たり):2[A]
<参考>A4988
3.Nema17:
・定格電流:0.4[A]
<参考>Nema17
公式サイトによると、モータードライバーA4988が供給できる2[A]というのはヒートシンクや強制空気流で充分に冷却していた場合の話みたいで、1[A]以上を流すのは推奨できないみたいです。
ということで、私は定格電流が0.4[A]であるNema17を選定しました。また、Nema17は4つ使うと0.4×4=1.6[A]になるので、最大で2[A]の電流を流すことができるACアダプタを選定しました。

次に、A4988に流れる電圧を設定しなければなりません。
\[
Imax=\frac{Vref}{8・Rcs}
\]
\[
・Imax:モーターへの最大制限電流[A]
\]
\[
・Vref:A4988の半固定抵抗とGND間の電圧[V](ロジック電圧)
\]
\[
・Rcs:A4988の電流検出抵抗[Ω](0.050[Ω])
\]
*Rcsについて、2017年1月から0.068[Ω]の物も出回り始めたみたいです
ここで、今回はNema17を使うので定格電流ImaxはImax=0.4[A]です。
これを元にロジック電圧を求めていきます。
\[
Vref=8・Imax・Rcs
\]
\[
=8・0.4・0.050
\]
\[
=0.16[V]
\]
この値になるようにテスターを当てながら半可変抵抗のねじを回していきます。このやり方については公式のyoutube動画が参考になるので、そちらをご覧ください。
URL:Setting the Current Limit on Pololu Stepper Motor Driver Carriers
また、ACアダプタを直流安定化電源として使う場合、ほとんどのものは元々、プラグがついているかと思います。そのプラグを切って配線をむき出してという作業が少しおっかないので、ちゃんと調べて行ってください。プラスマイナスとかを間違うと危険です。
あと、モータードライバをCNCシールドに差し込む方向を逆にすると、危険みたいなので、注意しましょう!
さて、ここまで書いたように作業すると、おそらく最初に出した写真のようなものが組みあがったかと思います。これでハードは完成です。
(2)ソフト
まず、ArduinoにGRBLなるものを書き込まないといけないみたいです。GRBLとはArduino用に作られたオープンソースのCNC制御用ファームウェアらしいです。
そのやり方についてはすでに自作CNCマシン・レーザーカッターについてというブログの方で詳しく説明されていましたので、そちらのサイトをご紹介しておきます。
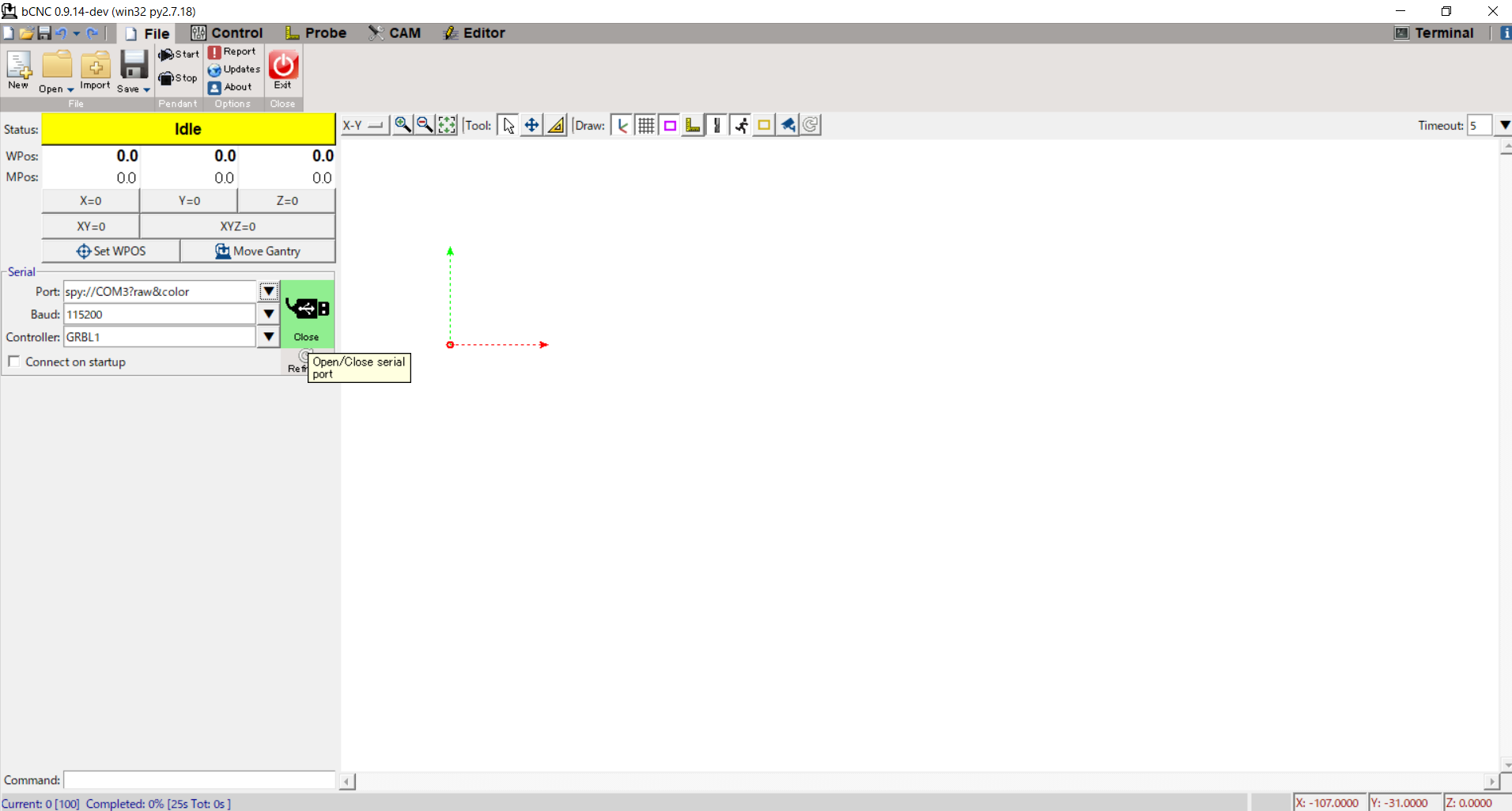
ArduinoにGRBLを書き込めたら、そのままPCにArduinoをつないだ状態でbCNCを起動します。
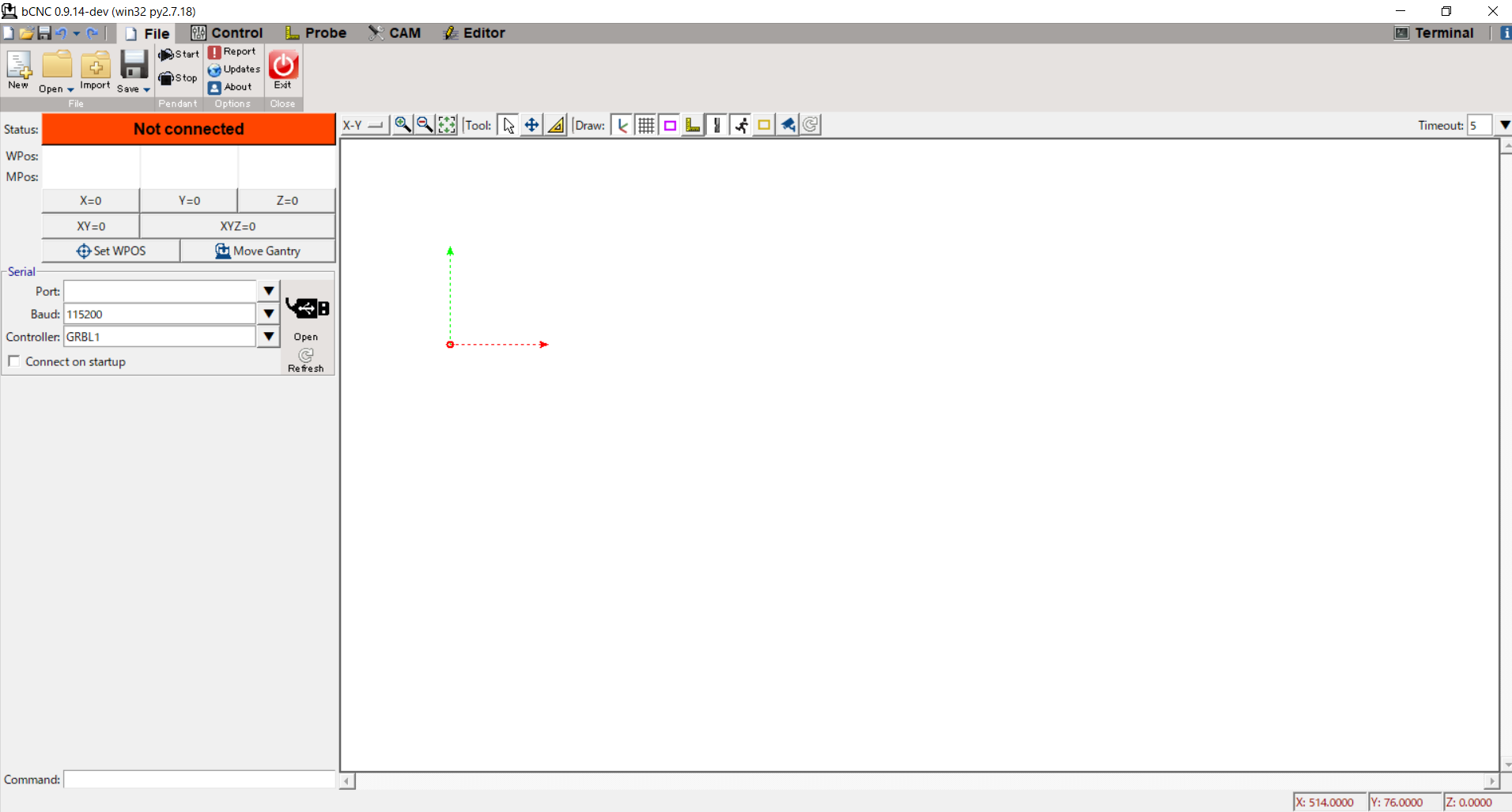
Arduinoをつないだ状態であれば、Serialの中のPort中にArduinoのポートが出てくるかと思います。多分、COMxという文字が入っている?その状態でOpenボタンを押して”Not connected”が”Idle”に変わればCNCシールドとの接続は完了です。たしか、この”Idle”表示を出すのに結構苦労した覚えがありますが、ちょっと忘れてしまいました🙇

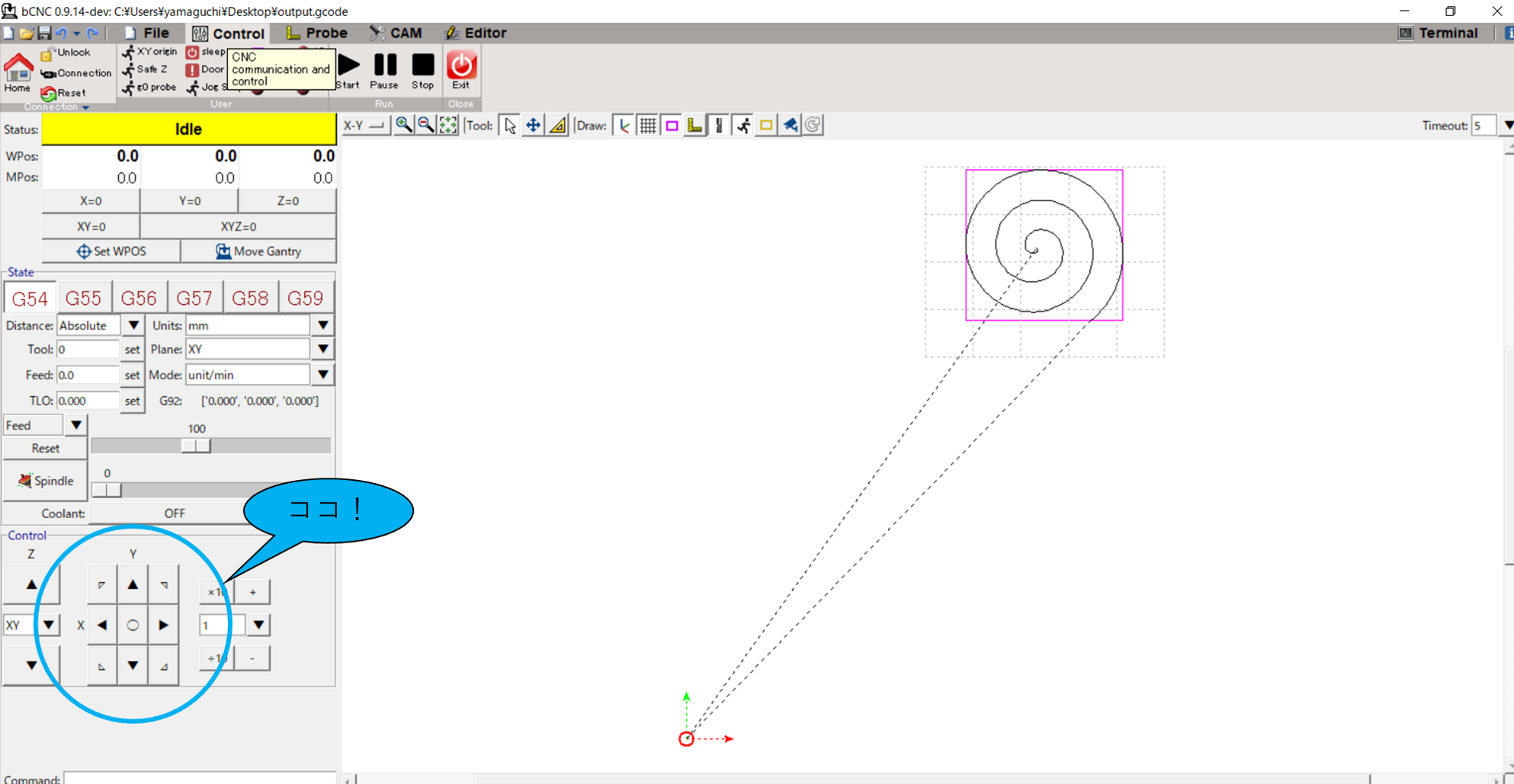
次にタブの中からControlを選択すると、下のような画面が出ると思います。そして、下の方向キー(今回はX軸の場所につないでいるので、Xしか動きません)の所を押すと、モーターが動くかと思います。
*渦巻は前々回の記事で作った渦巻を入れたものです。
以上が自作CNCを作る上で最低限必要なbCNCの使い方の説明でした。
今後も進展がありましたら追記していきたいと思います。
▲▲▲アリガ島▲▲▲
「未定」










参考になりました
ありがとうございました