こんばんは。
最近は「5月ってこんなに暑かったけ~☀」って思っています。なんか、梅雨明けぐらいから暑くなるイメージじゃなかったですか?
ちなみに、最近観たアニメは“SHIROBAKO”と“甲鉄城のカバネリ 海門決戦”で、どちらもシナリオ・作画共にすばらしい作品でした!
さて、今回はステッピングモーターに関する記事となります。これまで正確な位置制御を必要とする場面が無かったので使ってこなかったステッピングモーターですが、「その正確な位置制御機能を活かして何か面白いものが作れないかな~」と思ったので挑戦することにしました💪
そこで、DCモーターの時にTA7291Pというモータードライバを使っているようにステッピングモーターにもモータードライバが必要なわけですが、今回は値段の安さから秋月電子から発売されているL6470使用 ステッピングモータードライブキットを使おうと思います!
このモータードライバはストロベリーリナックスからも発売されていて、ネット上ではそちらの情報がほとんどでした(笑)
なので、この記事が「いつも使い慣れている秋月電子で買いたいけど、情報が・・・」という方のお役に立てば幸いです!
それでは~
シュワッチ!
①作るもの:
②用意するもの:
・パナソニック 単3形アルカリ乾電池 12本パック LR6XJ/12SW
・A-CRAFT リード付き 単三電池 4本ボックス 2個セット
・ワニ口クリップコード ワニ口クリップコード みのむしクリップ 測定ケーブル
・ブレッドボード・ジャンパーワイヤ(メス-オス)(20㎝) 40本
③回路:
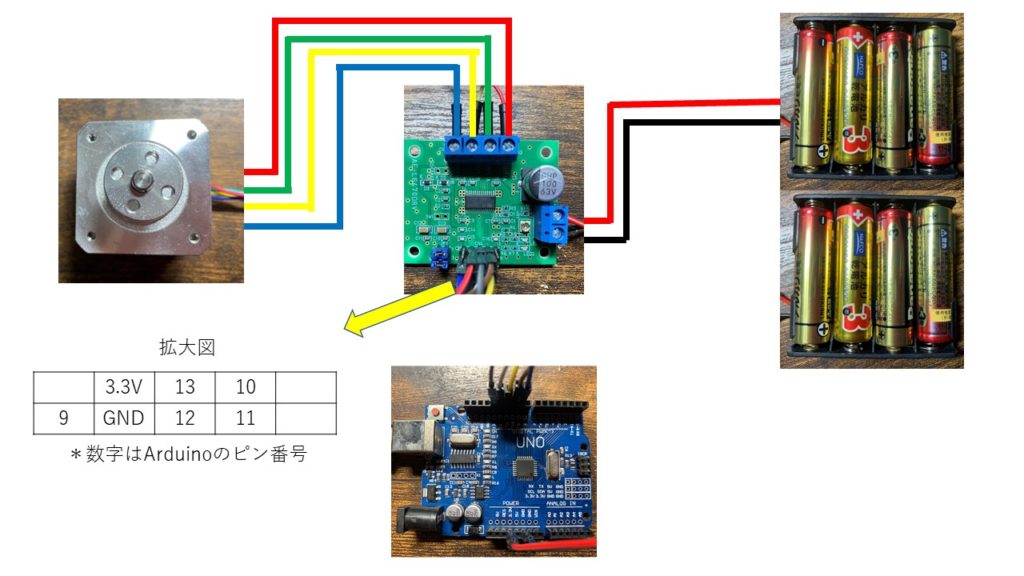
ポイント:
1)今回使用するステッピングモーターのデータシートを見ると、入力定格電圧:12[V]であるので単三電池(1個1.5[V])を8個直列につなぐことで電源を確保します。
2)このステッピングモーターはバイポーラ(双極性)型であるのでステッピングモーターの配線図とモータードライバの接続例をみて、下のように配線します↓
A相:
・OUT1A→赤色
・OUT2A→緑色
B相:
・OUT1B→青色
・OUT2B→黄色
*参考にさせて頂いたサイト↓
・バイポーラ ステッピングモーター SM-42BYG011の質問と回答
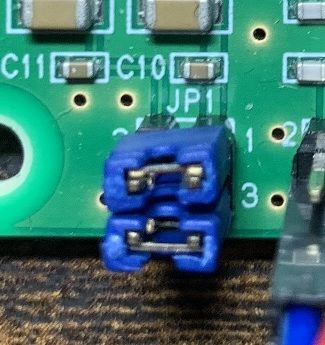
3)秋月電子でL6470使用のドライバキットを購入すると、下の写真のようなロジック電源設定ジャンパが2つあります。捨てずに下のように2つとも使ってください(僕が最初に捨てようとしたので・・・)
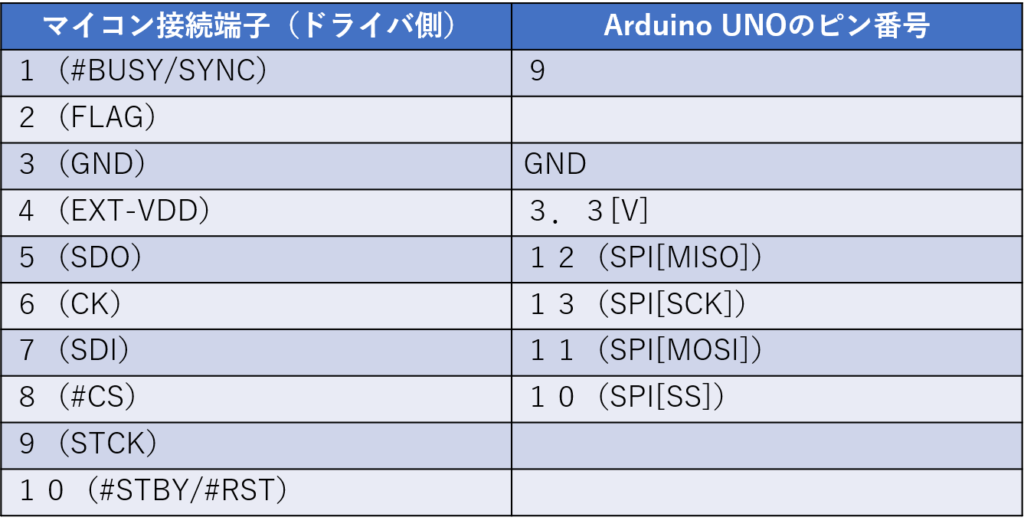
4)マイコン接続端子は使用するArduinoの種類によって変わります。今回はArduino UNOを使用したので、以下のように配線します。
5)今回使用するステッピングモーターキットはほとんどがはんだ付け済みでしたが、自分ではんだ付けをする必要がある部分が少しあります。以上のように配線してもうまくいかなかったときははんだ付けをやり直してみて下さい😉
④プログラム:
プログラムに関しては北の国から電子工作(仮)様が手軽に制御できるプログラムを公開してくださっているので、動かすだけが目標の今回はそちらを使用させていただきます→L6470をArduinoで簡単に動かすスケッチ
⑤完成画像:
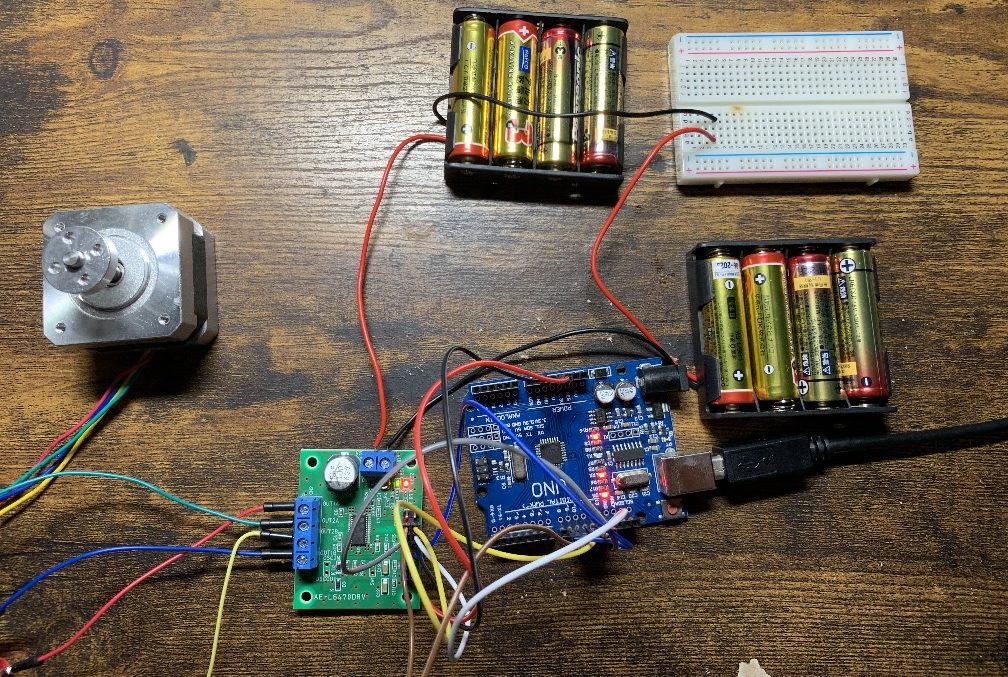
電池ボックスのリード線はそのままだと広がって、ブレッドボードに指すことが出来なかったのではんだ付けをして固めました。
⑥完成動画:
動画撮影時には北の国から電子工作(仮)様のプログラムのままでは動画で少し挙動が見にくかったのでvoid loop()の所を下のように変えています↓
void loop() {
L6470_move(1,200); //正転方向に200ステップする
L6470_move(0,400); //逆転方向に400ステップする
}
いかがでしたでしょうか?
秋月版L6470の情報はネット上にほとんど無かったため少し苦労しましたが、なんとかモーターを動かすことが出来ました♪
最後にクリスタの練習状況です↓
歩く練習です(笑)
▲▲▲アリガ島▲▲▲
「未定」









