こんにちは~
前回の記事の中で“からくり人形”のハードは完成させたので,今回はその制御面を作っていきます!
*前回の記事はこちら↓
【製作日誌】現代版からくり人形を作る~メカ編~
それでは~
シュワッチ!
①作るもの:
江戸時代に作られた“からくり人形”にモーターを追加することで,現代の日常社会でも使えるものにする!
②用意するもの(制御面):
・パナソニック 単3形アルカリ乾電池 12本パック LR6XJ/12SW
・A-CRAFT リード付き 単三電池 4本ボックス 2個セット
・ブレッドボード・ジャンパーワイヤ(メス-オス)(20㎝) 40本
・絶縁ラジアルリード型積層セラミックコンデンサー0.1μF 50V 2.54mm(10個入)
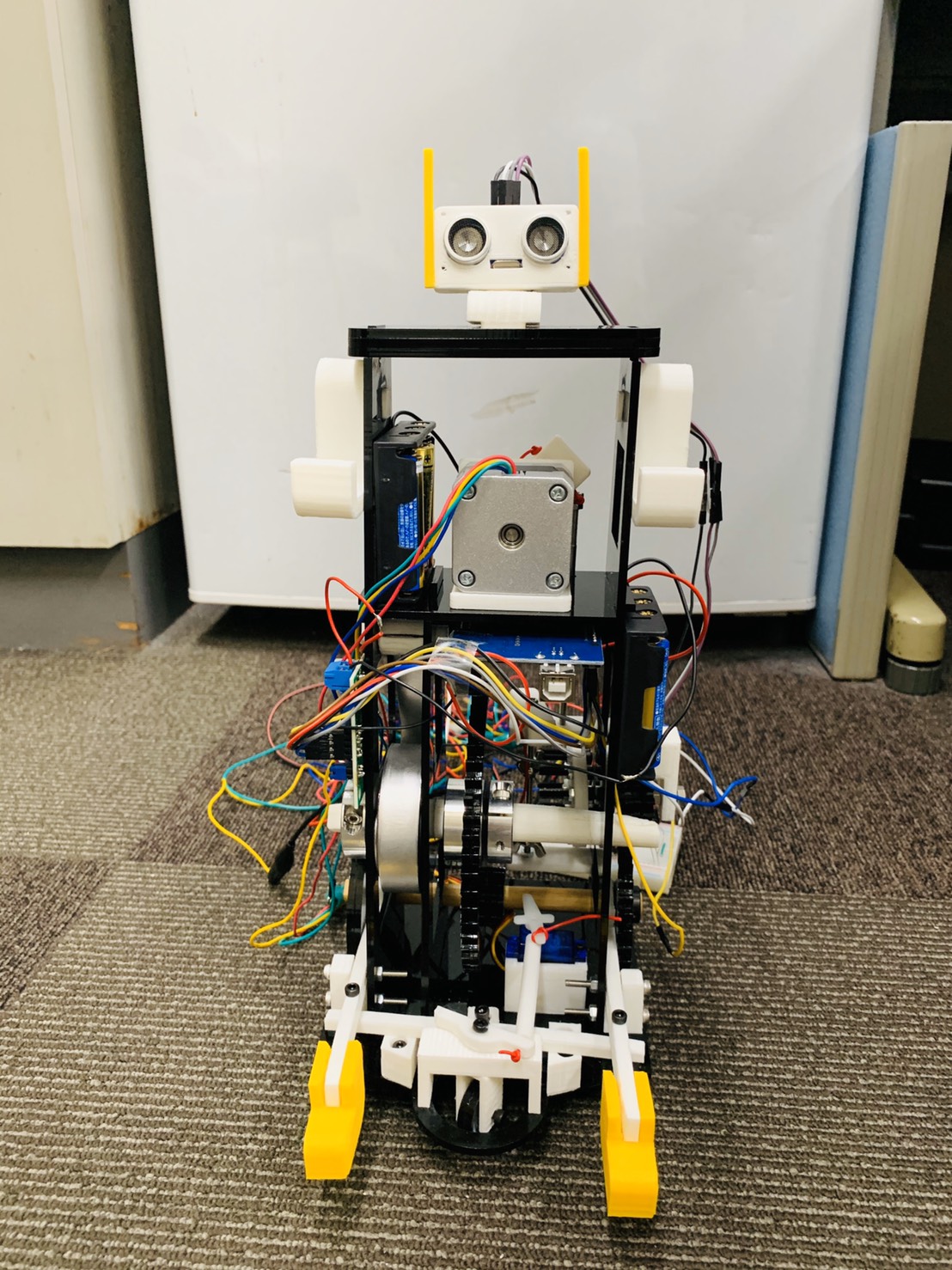
③完成画像:
前回の記事にも載せたので,1枚だけ↓
④完成動画:
⑤プログラム:
プログラムはArduinoIDEのみを使って作りました。
下のプログラムを使って超音波センサからの値を用いて、ステッピングモーターとサーボモータを制御しています。
このプログラムは北の国から電子工作(仮)様が公開して下さっている手軽にステッピングモーターを制御できるプログラムが基になっています。下のプログラムを読んでわからない所があったら下のURLの情報を参考にしてみて下さい!
・北の国から電子工作(仮)様のプログラム:L6470をArduinoで簡単に動かすスケッチ
いかがでしたでしょうか?
全2回で“【製作日誌】現代版からくり人形を作る”編をお送りしました。
出来れば、しっかり長い距離を動くものにしたかったのですが、技術・勉強不足でした😢
▲▲▲アリガ島▲▲▲
次回予告
「未定」
「未定」