こんばんは。
久しぶりの投稿となってしまいましたm(__)m
大学生はあと1週間で春休みという夢から覚めてしまいます・・・😢
は~~
さて、本題の前に少し近況を!
実は最近、遅かれながらFateにはまりだしました。アーサー・ペンドラゴン、最高です💪あと、“甲鉄城のカバネリ”というWIT STUDIOさんのアニメも全話見たのですが、こちらは作画が素晴らしすぎて。作画の美しさに口が開いたままでした(笑)
イラストが大好きなので、「ほえ~。イラストって動かせるんだ・・・」って素人ながらに作画班の技術力と根性に感心しました!
どれだけ時間と手間がかかっているのでしょうか?僕だったら、途中で気がくるっていそうです(笑)
ちなみに僕の画力はというと・・・
いつも上げているGIFを見ていただければわかりますが、棒人間くらいしかまともに描けません!!😢
さて、余談はこれくらいにして今回の本題に入りましょう↓
今回は“加速度センサから角度を取得する”ということで、Arduinoを使って加速度センサから取得した値を傾き角に変換してシリアルプロッタで出力させてみようと思います。
それでは~
シュワッチ!
①作るもの:
②用意するもの:
③回路:
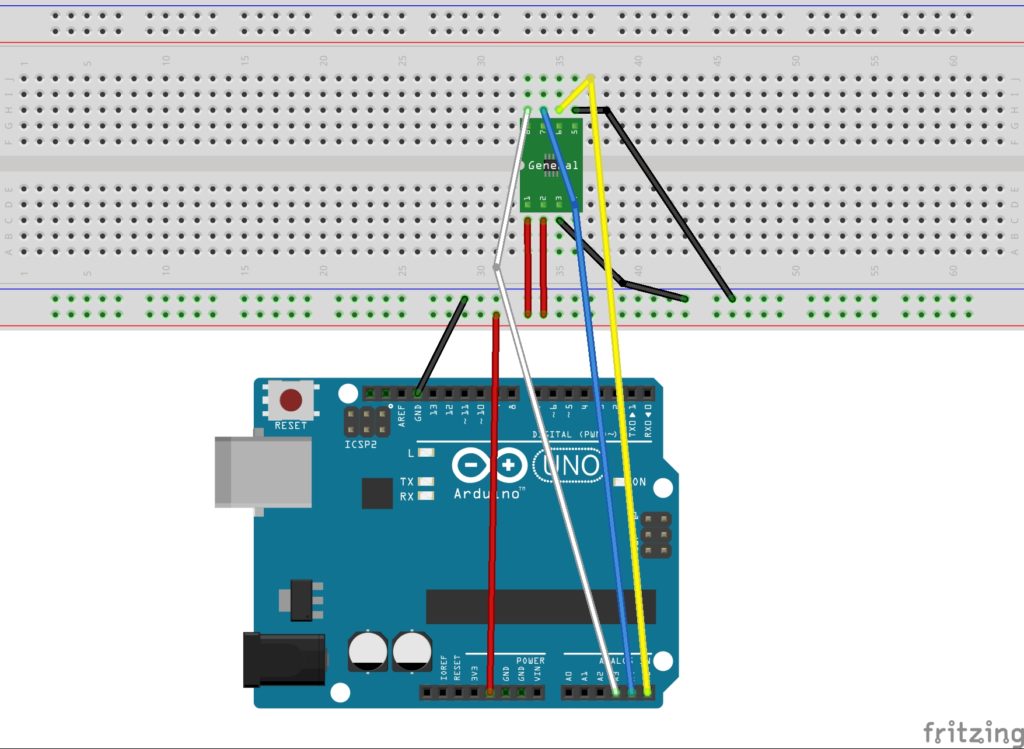
*KXR94-2050の素材が見つからなかったので、上の図では代わりのものを使っています。
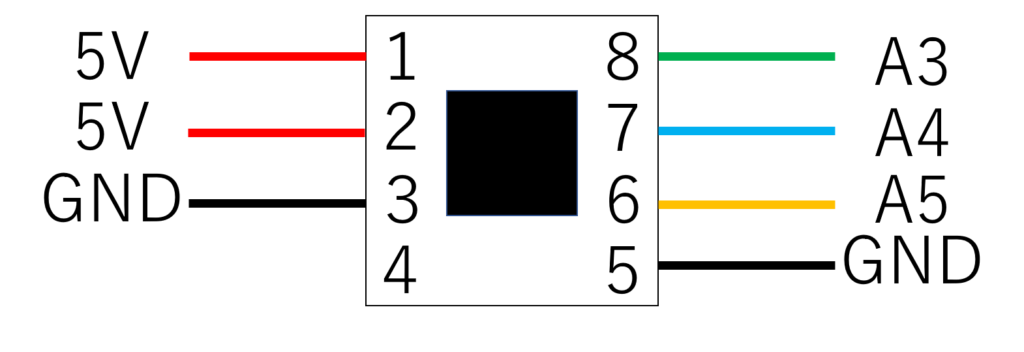
追記:加速度センサのピン番号がわかりやすいように拡大図を作成しました↓
 ④プログラム:
④プログラム:
⑤完成動画:
シリアルプロッタでX軸方向の傾き角を見たい時はSerial.println(realY);を、Y軸を出力する時はSerial.println(realX);をそれぞれコメントアウトして下さい。
いかがでしたでしょうか?
実際にやってみると分かるのですが、このプログラムでは初期値が“0.00”では無くて“0.35”とか少しずれた値が初期値になってしまいます😢
プログラムに値を代入すると、ちゃんと“0.00”になるので不思議です・・・。どなたか、原因がわかる方がいらっしゃれば教えていただきたいです(>_<)
それと、最初、このセンサの名前が“3軸加速度センサ”という名前なので「積分したら速度とか移動距離とかわかるのかな~?」と思っていたので挑戦してみたのですが、虚空の彼方へと値が飛んで行ってしまって、到底使えるものになりませんでした😢
*途中までやったものがこれです↓
ハイパスフィルタやローパスフィルタを使ったりしてみたのですが、状況は好転せず・・・
こちらもこの3軸加速度センサKXR94-2050を使って、移動距離の測定する方法をご存知の方がいらっしゃれば教えていただきたいですm(__)m
最後にCLIP STUDIO PAINTの練習状況です↓(これまで“例のソフト”と言っていたやつはクリスタでした(笑))
▲▲▲アリガ島▲▲▲
「未定」








